We present a unified framework for solving partial differential equations (PDEs) using
video-inpainting diffusion transformer models. Unlike existing methods that devise
specialized strategies for either forward or inverse problems under full or partial
observation, our
approach unifies these tasks under a single, flexible generative framework. Specifically, we
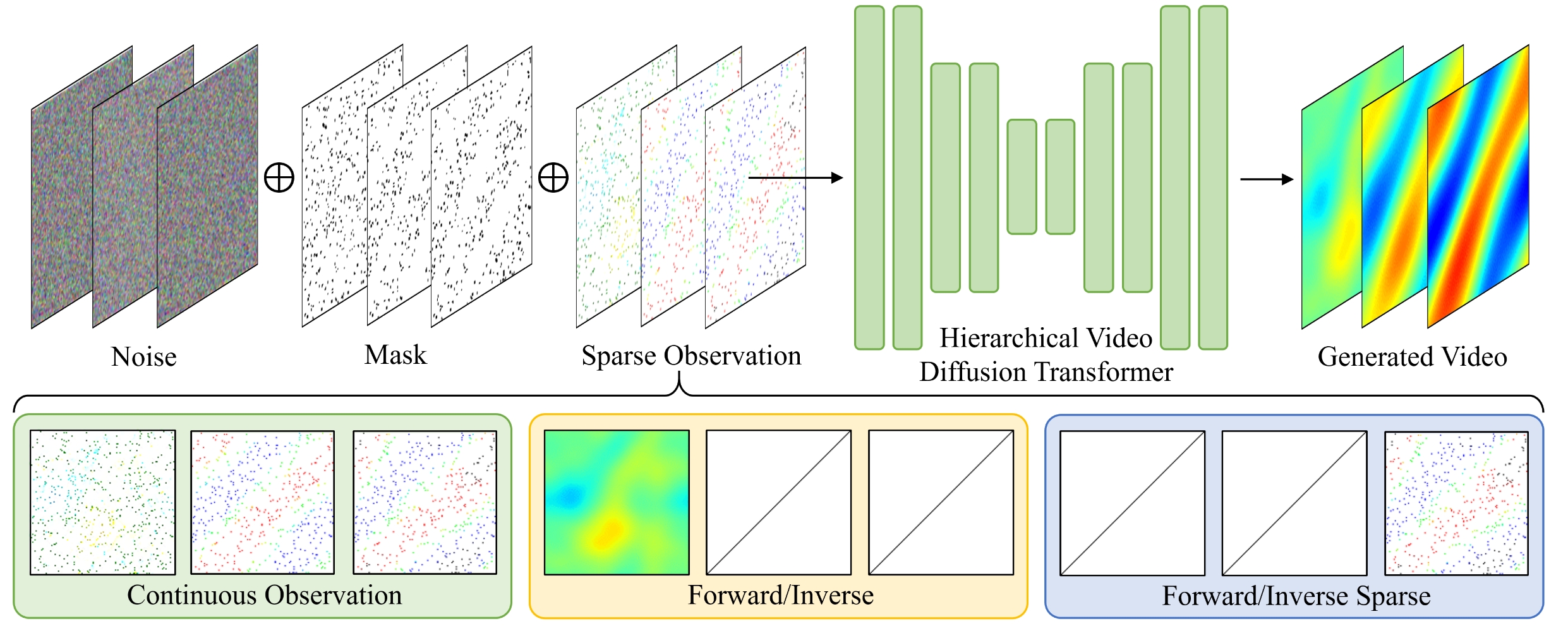
recast PDE-solving as a generalized inpainting problem, e.g., treating forward prediction as
inferring missing spatiotemporal information of future states from initial conditions. To
this end, we design a transformer-based architecture that conditions on arbitrary patterns
of known data to infer missing values across time and space. Our method proposes pixel-space
video diffusion models for fine-grained, high-fidelity inpainting and conditioning, while
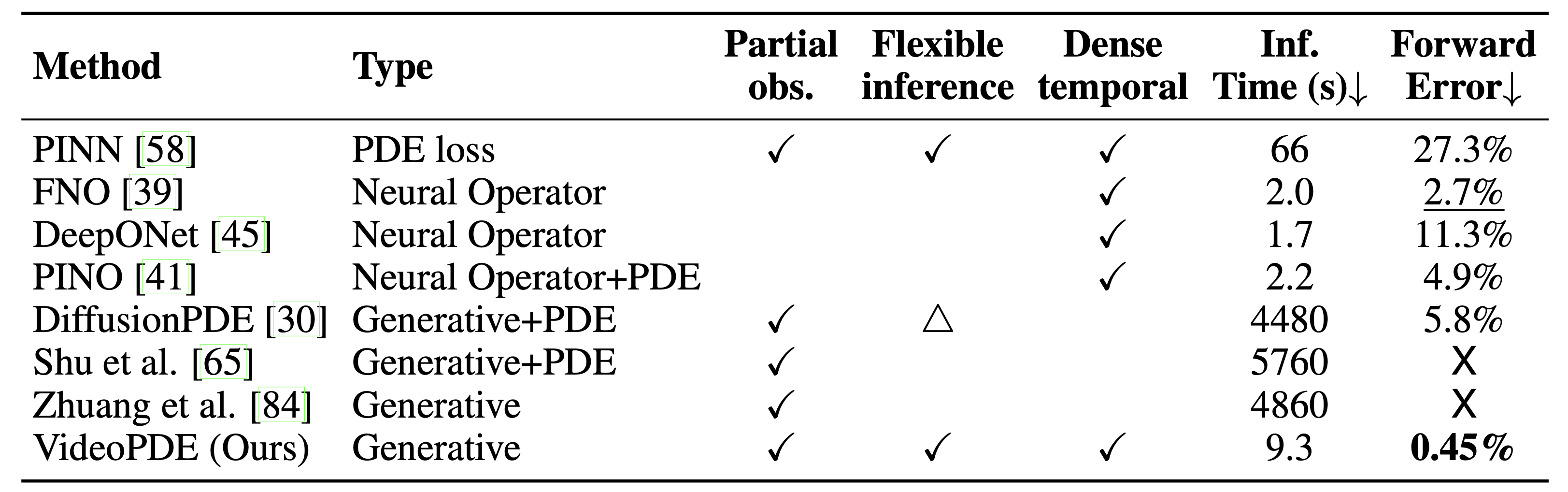
enhancing computational efficiency through hierarchical modeling. Extensive experiments show
that our video inpainting-based diffusion model offers an accurate and versatile solution
across a wide range of PDEs and problem setups, outperforming state-of-the-art baselines.